UNIDAD EDUCATIVA PARTICULAR “POLITÉCNICO”
4° AÑO PAI - 10° AÑO DE BÁSICA “A”
TECLADO + Arduino
Nombre: Andrea Cáceres Fecha: 26/09/17
Un teclado
matricial es un dispositivo que agrupa varios pulsadores y permite controlarlos
empleando un número de conductores inferior al que necesitaríamos al usarlos de
forma individual. Podemos emplear estos teclados como un controlador para un
autómata o un procesador como Arduino.
Lo más práctico es conectar el teclado a Arduino
directamente, podemos usar cables de protoboard, o bien con un peine de pines
para que no se suelte nada.
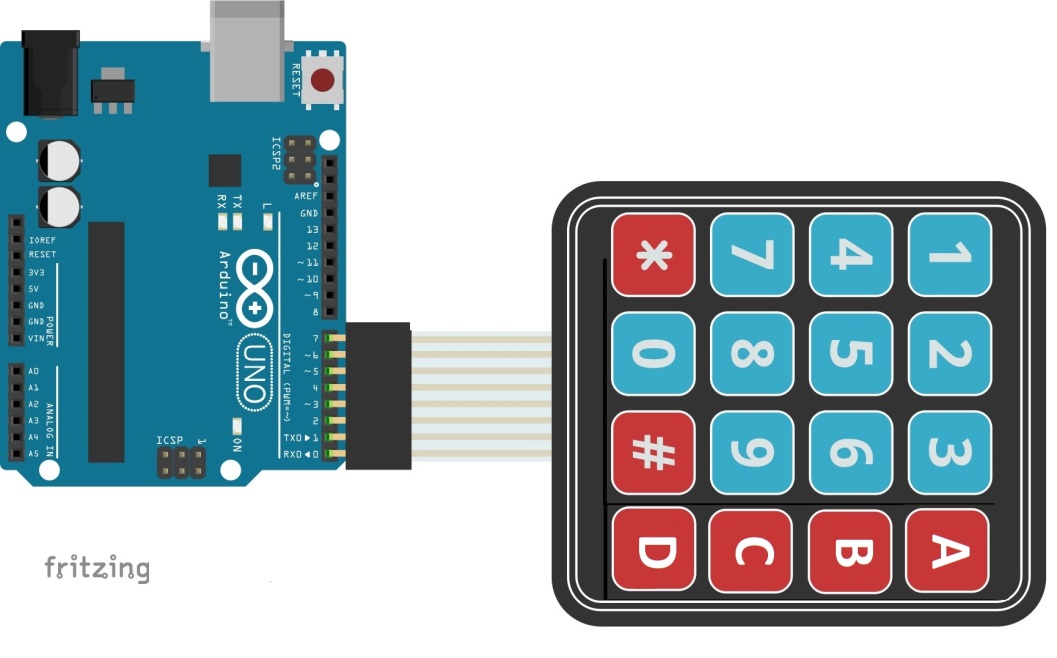
Las primeras 4 líneas del teclado matricial que corresponden
a las filas las conectamos del pin 2 al pin 9 del arduino respectivamente.
A continuación se muestra el código utilizado, cada
línea tiene su explicación y funcionamiento a modo de comentario

Se incluye la librería keypad ya sea que estemos trabajando en arduino o en TinkerCad

En mi caso al realizarlo por Tinkercad me funciona y al presionar cada botón se proyecta lo pulsado a través del serial monitor, poniendo el respectivo código y su librería.
 Haciendo unos cambios en el código podemos hacer que los números se juntes demostrado por el serial monitor como se aprecia en la imagen.
Haciendo unos cambios en el código podemos hacer que los números se juntes demostrado por el serial monitor como se aprecia en la imagen.
CODIGO: (CADENA)
const byte Filas = 4; //Cuatro filas
const byte Cols = 4; //Cuatro columnas
byte Pins_Filas[] = {9, 8, 7, 6}; //Pines Arduino a los que contamos las filas.
byte Pins_Cols[] = { 5, 4, 3, 2}; // Pines Arduino a los que contamos las columnas.
char Teclas [ Filas ][ Cols ] =
{
{'1','2','3','A'},
{'4','5','6','B'},
{'7','8','9','C'},
{'*','0','#','D'}
};
Keypad Teclado1 = Keypad(makeKeymap(Teclas), Pins_Filas, Pins_Cols, Filas, Cols);
String cadena="";
void setup()
{ Serial.begin(9600) ; }
void loop()
{ char pulsacion = Teclado1.getKey() ;
if (pulsacion != 0) // Si el valor es 0 es que no se ha pulsado ninguna tecla
{
cadena=cadena+pulsacion;
Serial.println(cadena);
}

CODIGO: (CADENA)
const byte Filas = 4; //Cuatro filas
const byte Cols = 4; //Cuatro columnas
byte Pins_Filas[] = {9, 8, 7, 6}; //Pines Arduino a los que contamos las filas.
byte Pins_Cols[] = { 5, 4, 3, 2}; // Pines Arduino a los que contamos las columnas.
char Teclas [ Filas ][ Cols ] =
{
{'1','2','3','A'},
{'4','5','6','B'},
{'7','8','9','C'},
{'*','0','#','D'}
};
Keypad Teclado1 = Keypad(makeKeymap(Teclas), Pins_Filas, Pins_Cols, Filas, Cols);
String cadena="";
void setup()
{ Serial.begin(9600) ; }
void loop()
{ char pulsacion = Teclado1.getKey() ;
if (pulsacion != 0) // Si el valor es 0 es que no se ha pulsado ninguna tecla
{
cadena=cadena+pulsacion;
Serial.println(cadena);
}








{kind=link}